с 6 ноября по 26 ноября Вы можете выиграть один из сертификатов на обучение в нашей автошколе#33 #33 #33
3. Сделать репост сообщения о розыгрыше с этой страницы, нажать мне нравится и рассказать друзьям (на момент розыгрыша вы должны состоять в группе и информация о розыгрыше должна быть у вас на стене#33 )
vk.com/autoprofi.perm?fixed=1
Победители будут определены 1 августа#33 #33 #33 #33 #33
**Данный сертификат действует на обучение в группу с 26 ноября#33 #33 #33
Синнтерком
Компания предоставляет комплекс услуг в сфере телекоммуникаций.Имеется Call Центр, который оказывает услуги по обработке входящих и исходящих вызовов.
Ген. директор - Кудряшов Вячеслав Валерьевич. Коммерческий директор- Григорьев Александр Николаевич. Менеджер - Симанов Александр. Мерзкие люди.
Контора находится у черта на куличиках , в офисе творится хаос: все разбросано, духота,неприятный запах, места мало. Зарплату задерживают на месяц. Если и выдают - то в 2раза меньше, чем обещали, ссылаясь при этом на различного рода штрафы. Работать приходится по 12 часов. Безо всякого угрызения совести могут заставить работать и ночью. Люди там долго не задерживаются, через месяц увольняются.При увольнении вообще лишают чуть ли не всей зарплаты, опять же ссылаясь на штрафы.
При устройстве на работу заключается договор подряда, в котором зарплата не указывается. На работу(оператором) берут абсолютно всех, без разбору, навыков никаких не требуют.
Компания тухлая, без каких-либо перспектив развития, клиентов мало, имеются долги.
Руководство ужасное. Люди не из приятных. Кудряшов и Григорьев сидят в соседнем офисе и даже работников в лицо не знают. А тов. Симанов ходит и с довольной рожей незаслуженно штрафует операторов (есть подозрение, что он от кого-то скрывается).
НИКОГДА НЕ УСТРАИВАЙТЕСЬ НА РАБОТУ В КОМПАНИЮ СИННТЕРКОМ. НЕ ОЦЕНЯТ,ОБИДЯТ, ОБМАНУТ.
v_kudryashov
Вячеслав Кудряшов
Программирование контроллера для управления бесколлекторным двигателем - это основное, на что мне пришлось тратить время.
Сдесь я опишу задачи, которые приходилось решать.
1. Формирование трехфазного напряжения.
В статьях из интернета я прочел, что bldc должны управляться трапецевидной формой сигнала, а синусоидальной формой сигнала управляются т.н. blac двигатели.
Покрутив шуруповертом несколько бесколлекторных двигателей я оценил на осциллографе форму противоЭДС, и это был синус. Таким образом я решил, что правильнее будет формирование трехфазного синуса. Математику можно посмотреть в апнотах Atmel. В результате оказывается, что ШИМом на фазах нужно формировать вот такие вот сигналы:
Собствено сигналы - это Ряд1,2,4. А Ряд 3 - это синусоида, получаемая в результате между двумя любыми фазами.
Я составил таблицу из 256 значений от 0 до 360 градусов для этой формы сигнала и делал 3 выборки через 120 градусов для каждой из фаз.
Взятый мной контроллер Atmel имеет так называемый Power Stage Controller. Суть в том, что можно записать значения ШИМ в 3 регистра и заниматься другими вычислениями, а в это время контроллер будет включать и выключать выводы PSC, поддерживая требую скважность ШИМ. Затем записать следующие значения и т.д. При этом счетчик PSC работает на повышенной частоте, обеспечивая высокую точность ШИМ. Вобщем это намного лучше, чем программное формирование ШИМ.
Решив эту задачу уже можно повертеть двигатель, но если ротор не успеет за магнитным полем и сорвется, то раскрутиться он уже не сможет и будет просто колебаться или вибрировать. Поэтому для определения положения ротора нужно приступить к следующей задаче.
2. Оценка состояния датчков холла.
В промышленных бесколлекторных двигателях используются цифровые датчики холла, в отличии от дисководов и сидиромов. При смене направления магнитного потока выход датчика замыкается на землю или размыкается и напряжение на нем подтягивается внешней схемой до 5В.
Если двигатель имеет 1 пару полюсов, то выход датчика на оборот будет иметь 2 комбинации - 0 и 1. Если установить 3 датчика через 120 электрических градусов, то на оборот получится 6 различных состояний+2 невозможных 111 и 000. Возможно можно установить и больше датчиков, но для двигателя с 2 парами полюсов 12 контрольных точек на оборот вполне достаточно для управления.
Возможно мне не повезло, но двигатели FL42BLS01 и FL57BLS04, с которыми я работал, имели различное расположение датчиков холла. Поэтому была создана универсальная процедура калибровки. При медленном повороте двигателя запоминается положение датчиков холла, а в реальной работе поле переключается со смещением в 90 электрических градусов. Отклонение от 90 градусов снижает КПД, но на двигателях с большим количеством пар полюсов позволяет снять больше мощности, у моделистов это называется управление таймингом. И может мне ещё раз не повезло, но на двигателе FL42BLS01 датчики стояли немного неравномерно, поэтому процедура калибровки была написана не зря.
3. Расчет необходимой скорости вращения магнитного поля, добавление плавного старта и др.
По времени между срабатываниями датчиков холла можно приблизительно определить реальную частоту вращения двигателя и скорректировать скорость вращения магнитного поля. Всё, проделанной работы уже достаточно для вращения мотора. Остальное - дополнительные функции.
Плавный старт. С момента запуска, например на одну секунду, ограничивается максимальная амплитуда напряжения. Это позволяет избежать резких рывков на старте.
Также желательно добавить ограничение напряжения в области малых скоростей, это будет защита от заклинивания и перегрева, но соответственно уменьшится и максимальный вращающий момент.
Вобщем-то нужно ещё добавить действия по таймауту датчиков (мотор заклинило), добавить функцию тормоза (быстрая остановка мотора после выключения), реверса. Также не стоит забывать про защиту от короткого замыкания.
4. Поддержание скорости.
Для этой задачи стоит ознакомиться с теорией ПИД-регулирования.
Сразу скажу, что можно ограничиться пропорциональным регулированием. То есть изменять амплитуду напряжения пропорционально ошибке по скорости.
Дело в том, что интегральная компонента регулирования повышает точность, но снижает устойчивость и с инерционными нагрузками на двигатель могут начаться колебания.
Дифференциальная же компонента как раз служит для борьбы с колебаниями инерционных нагрузок, но требует высокой точности от датчиков, которую не обеспечивают датчики холла.
При инерционных нагрузках нужен уже другой уровень - быстрая электроника и точный датчик-энкодер.
От датчиков холла можно добиться стабильности - снимать показания 1 раз за оборот, но на снижение частоты съема данных в 12 раз я решил не идти.
Я реализовывал поддержание скорости в достаточно специфичном режиме - с минимальным шумом в диапазоне до 2 тыс. оборотов и с относительно постоянной нагрузкой. В остальных случаях этот режим работает посредственно.
5. Интерфейс.
В промышленных решениях обычно используют аналоговый вход для амплитуды и несколько входов под включение, реверс и т.д. Управление при этом можно организовать очень просто - переменным резистором и несколькими кнопками. Однако при большой длине проводов или высокой мощности двигателя наводятся помехи и провода нужно экранировать. В моделизме скорость задаётся не напряжением, а частотой, но вопрос с помехоустойчивостью всё равно до конца не решается.
Поэтому я использовал помехоустойчивый интерфейс RS485, а данные передавал по протоколу MODBUS. Старейший и наиболее простой стандарт, на изучение которого у меня тем не менее ушло порядочно времени. Ну и естественно пришлось делать панель управления на микроконтроллере, которая бы тоже понимала MODBUS. А на ней дисплей, кнопки и энкодер.
Ну вот вкратце и всё!
Если будут вопросы - дополню.
Основная задача блока управления бесколлекторным двигателем - переключать обмотки статора в зависимости от положения ротора.
В двигателе постоянного тока эту задачу выполняет коллектор - диск на роторе с контактными площадками, по которому скользят токопроводящие графитовые щетки и переключают обмотки.
В асинхронном двигателе знать положение ротора не нужно, но для регулировки скорости нужно менять частоту переключения обмоток (или работать от сети со стандартной частотой 50Гц)
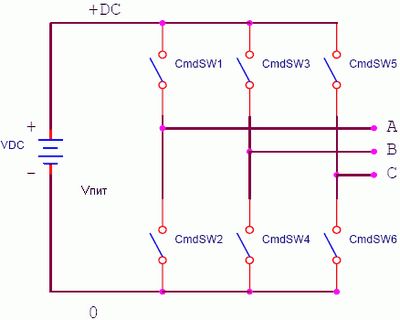
Я начинал изучение схемотехники драйвера бесколлекторного двигателя по апноте Atmel AVR492: Управление бесколлекторным электродвигателем постоянного тока с помощью AT90PWM3 Она есть на русском языке. Немного пояснений: Для управления БКЭПТ используется силовой каскад, состоящих из 3 полумостов. Схема силового каскада показана на рисунке 4.
Здесь силовой каскад - это 6 транзисторов, схематично показанных ключами CmdSW. полумост - пара транзисторов, соединенных последовательно между + и - питания, например CmdSW1, CmdSW2. A, B, C - выводы обмоток двигателя, соединение обмоток между собой как у асинхронных двигателей. Эта схема позволяет току протекать между фазами A, B, C в любом направлении. Например если замкнуть ключ CmdSW1 и CmdSW4, то ток потечет от вывода A к выводу B, а если замкнуть CmdSW3 и CmdSW2 - от вывода В к выводу A. А если замкнуть CmdSW1 и CmdSW2 - получится короткое замыкание с выгоранием транзисторов, так что управлять транзисторами нужно осторожно. Кстати для управления коллекторым двигателем с реверсом нужно 2 полумоста, без реверса - 1 транзистор.
Для регулирования силы тока в фазе используют широтно-импульсную модуляцию (ШИМ). Например часть времени открывают ключи CmdSW1, CmdSW4 и ток начинает течь от A к B , затем закрывают CmdSW1 и открывают CmdSW2 и за счет индуктивности обмоток ток продолжить течь по кольцу A-B-CmdSW4- земля -CmdSW2. Кстати в транзисторы встроены диоды, проводящие ток в обратном направлении. Так что если во второй фазе ШИМ разомкнуть все транзисторы, то в обмотке начнет расти напряжение и через эти диоды энергия из обмоток начнет возвращаться в сеть.
Эта схема из 6 транзисторов называется трехфазным инвертором и применяется для преобразования постоянного тока в трехфазный переменный для питания как бесколлекторных, так и асинхронных двигателей. Для бесколлекторных двигателей применяются низковольтные полевые транзисторы (MOSFET), для асинхронных двигателей - высоковольтные биполярные транзисторы с изолированным затвором (IGBT). С помощью этой схемы можно осуществлять и рекуперацию. Её используют все и лучше не сделать.
Как инвертор бывает оформлен в зависимости от мощности двигателя:
Для управления двигателями очень маленькой мощности используются специализированные микросхемы, в которой уже находятся 6 транзисторов и логика для управления ими. Это решение для двигателей дисководов и вентиляторов. Следующий шаг - микросхема, управляющая транзисторами и транзисторы отдельно. И для высоких мощностей микросхема или контроллер управляет микросхемами драйверов транзисторов, а драйвера уже управляют самими транзисторами. Зачем такие сложности? Мощные транзисторы имеют управляющий вход с большей емкостью, слабая электроника не в состоянии обеспечить токи до нескольких ампер для быстрого их открытия. А у полуоткрытого транзистора большое сопротивление, он в этот момент греется или даже сгорает :) Поэтому используют микросхемы-драйверы, внутри которых кстати тоже транзисторы, только менее мощные. Получается такой каскад из транзисторов.
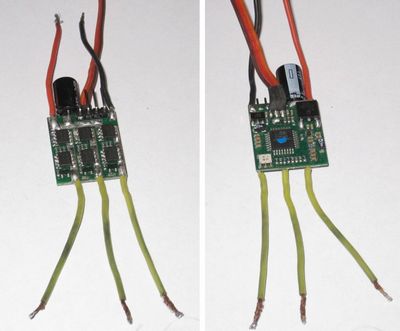
Вот первый пример реализации инвертора - авиамодельный. самый дешевый. Фото с двух сторон.
На одной стороне видно 6 транзисторов в корпусах SOIC. (3 N-канальных, 3 P-канальных), на другой стороне микроконтроллер ATMEGA8 и линейный стабилизатор для получения 5В питания. Ещё есть электролитический конденсатор и всякая мелочь - резисторы с конденсаторами. И всё. Дешево и сердито. Цена в рознице около 1000р. Микроконтроллер напрямую управляет затворами транзисторов. Греется такой контроллер довольно сильно, но так как он устанавливается на авиамодели, то хорошо обдувается. Разумеется есть более продвинутые модели, это просто пример упрощения и миниатюризации.
А вот фотография демо-платы от Atmel
Предполагается, что можно купить её и сразу начать программировать контроллер, пытаться крутить двигатель. Я решил не покупать, возможно зря. Во всяком случае к ней неплохо бы продавать сразу запасные транзисторы, я их сжег не один раз. И контроллер пару раз. Собственно 6 транзисторов справа, контроллер слева, драйвера транзисторов на другой стороне.
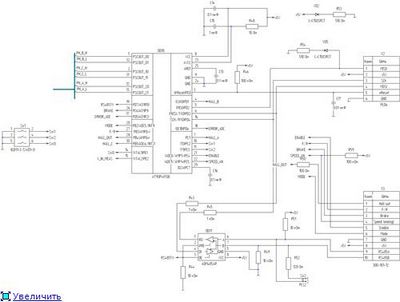
Схема моего драйвера с пояснениями
Я решил не делать простейший драйвер с тем, чтобы расширить возможности его применения, при необходимости несложно будет упростить. Схема разбита на 3 части. Она не такая наглядная, как в апноте Atmel, но постараюсь всё пояснить.
Первая часть - силовая
Силовые транзисторы VT1-VT6 управляются микросхемами-драйверами DA1-DA3. Транзисторы я выбрал IRLR3705 как одни из наиболее мощных в корпусе D-Pak на напряжение 55V с сопротивлением 8мОм. Я рассчитывал на напряжение работы 36В плюс запас. В принципе можно ставить транзисторы на радиаторы и использовать корпуса TO-220, но я решил не усложнять монтаж и паять транзисторы на плату. В таком случае для меньших мощностей можно ставить транзисторы в корпусе soic, а для больших - в D2-Pak. Драйвера взял самые мощные из полумостовых от фирмы International Rectifier - irf2186s с током управления до 4A. Получился большой запас, но самые простые драйвера ir2101 из апнота атмел (ток 130/270мА) с мощными транзисторами справлялись плохо, разница в нагреве транзисторов была ощутима. Полумостовой драйвер управляет двумя транзисторами - верхним и нижним, для управления верхним транзистором нужно высокое напряжение, которое получается по бустрепной схеме питания с помощью диода и конденсатора (например C6, DD7), эта схема наиболее проста и принцип её можно легко найти в интернете. Можно было взять одну микросхему full-brige для управления сразу шестью транзисторами, но у меня разводка с ней получалась хуже. Между затворами транзисторов и драйверами - резисторы с диодом. Они ограничивают ток затвора, причем ток зарядки почти в 2 раза больше. Тут следующая логика - чем больше ток, тем меньше греются транзисторы при переключении, но растут всплески напряжения. Поэтому номинал резисторов нужно уменьшать до какого-либо разумного предела. Причем транзистор открывается медленнее, чем закрывается, поэтому ток зарядки я сделал больше. Сигнальные выводы драйверов подтянуты к земле на всякий случай, чтоб не сработали когда нет сигналов управления. В целом здесь всё почти так же, как в апноте атмел. Датчики холла также подключил как в апноте, здесь ничего интересного. Питание, силовые Выводы транзисторов и выводы датчиков холла выведены на клеммник X1. Для защиты от короткого замыкания нужно контролировать ток. Для этого служат резисторы R19, R21 суммарным сопротивлением 0,005Ом (в апноте был резистор 0,1Ом), падение напряжение на них усиливается микросхемой LM358 и идет на компаратор и АЦП контроллера. Реализация у меня получилась не очень удачной, но в большинстве случаев защита срабатывает. Неплохо было бы ставить переменный резистор, чтобы пользователь мог задавать порого срабатывания защиты, но это как-нибудь потом ). Также в контроллер заведен сигнал V_IN_MEAS, пропорцональный входному напряжению. Сделано это, чтобы не давать работать драйверу при входном напряжении более 36В, но защиту я пока не включил.
Следующая часть схемы - питание логических элементов .
Из входного питания 24..36В нужно получить 12В для питания драйверов транзисторов и 5В для остальной логики
Для получения 12В я использовал линейный стабилизатор MC78M12. Лишнее напряжение он просто рассеивает в виде тепла, но так как драйверы транзисторов поребляют не очень много нагрев приемлемый.
Для 5В питания линейный стабилизатор уже применить не получилось, потому что 5В ещё задумывалось использовать для питания внешнего экрана индикации и нагрев оказался слишком большим. Поэтому применил понижающий преобразователь L5973AD. Он не очень дорогой, но в отличии от ещё более дешевых вариантов имеет защиту от короткого замыкания на выходе. Внешняя обвязка для него и разводка дорожек выполнена по соответствующей апноте.
Обе эти микросхемы имеют максимально допустимое напряжение 35В. Для гашения возможного излишнего напряжения предназначена конструкция из транзисторов VT7, VT8 и стабилитрона VD3.
Последняя часть схемы - микроконтроллер AT90PWM3B с обвязкой .
6 выводов PSCOUT_XX используются для управления драйверами транзисторов.
3 вывода HALL_X используются для отслеживания датчиков холла двигателя.
3 вывода задействованы на микропереключатель SA1 - он служит для переключения интерфейсов драйвера (RS485 либо переменный резистор с кнопками), выбора числа пар полюсов подключенного двигателя (2 либо 4) и для проведения калибровки двигателя (определение положения датчиков холла)
3 вывода задействованы для управления микросхемой-драйвером RS485
6 выводов задействованы под вариант традиционного управления драйвером - с кнопками и переменным резистором. 4 кнопки служат для включения/выключения (Enable), реверса(F/R), тормоза(Brake) и выбора режима поддержания скорости(Mode). Еще один вывод Speed(analog) для переменного резистора задания скорости и на последний выход Hall_out подаются импульсы при срабатывании датчиков холла. Эти выводы и выводы интерфейса RS485 выведены на клеммник X3.
2 вывода задействованы для контроля сигнала токового шунта ERROR_ADC. Один для быстрого срабатывания защиты, другой для грубой оценки потребляемого тока.
1 вывод для контроля входного напряжения V_IN_MEAS
1 вывод для светодиода VD5, полезного для индикации различных событий.
Также на схеме есть разъем программирования контроллера X2
Представленная схемотехника конечно не соответствует первоначальной идее о максимально дешевом драйвере, но относительно легко может быть упрощена. Можно убрать интерфейс RS485, поставить менее мощные транзисторы и драйверы управления ими.
Как-то для перемешивающего устройства мне потребовалось выбрать двигатель, долговечный и компактный. Идеальным тогда мне показался бесколлекторный (вентильный) двигатель с датчиками холла. Замечательный двигатель, но он имеет главный недостаток - дороговизну блока управления этим двигателем. И тогда у меня появилась идея - попробовать сделать дешевую плату управления этим двигателем. Этим и занимался в свободное время. Перемешивающее устройство в итоге так и не было сделано, но зато я накопил некоторый объем знаний и сделал плату управления этим двигателем. В процессе работы пришлось пойти на некоторое усложнение и удорожание - добавил токовую защиту, интерфейс связи RS485. но что-то можно будет и убрать потом, был бы спрос. Также для дешевизны нужен серийный выпуск, но об этом думать пока рано, сперва нужно довести разработку до ума, поэтому буду благодарен за любые советы и подсказки. Также могу поделиться своим опытом.
Вот что получилось в результате:
на фото 2 платы - плата дисплея 101х45мм и плата управления двигателем 98х50мм.
и эти же платы снизу:
Основные характеристики платы управления бесколлекторным двигателем:
Напряжение питания 24..44В
Максимальный ток 10А
режимы работы: контроль напряжения / контроль скорости
управление: RS485 MODBUS / потенциометр и кнопки
встроенный источник +5V 1A
Себестоимость единичного изготовления - 2000р. (+1000р. - плата индикации)
Немного пояснений:
1. Нестандартное напряжение питания 44В может пригодиться, чтобы питать 36В двигатели от 48В блоков питания, имеющих подстройку напряжения. В принципе можно расширить диапазон до 48В, немного потеряв в параметрах.
2. Ток в 10А подходит для работы самого мощного 36В двигателя FL56BLS04 в номинальном режиме. Допускается повышение тока при принудительном охлаждении. Можно ставить транзисторы мощнее в больших корпусах, но тогда потребуется и мощный дорогой блок питания. Целесообразность можно обсудить.
3. Поддержание скорости хорошо работает только с малоинерционной нагрузкой и частотой вращения до половины номинальной.
4. К блоку разработана панель управления с интерфейсом RS485. При необходимости можно внести в панель изменения, либо могу выложить её схему и программу для контроллера attiny2313.
5. Изготовление корпусов для платы планируется только при положительных отзывах и наличии спроса. Без корпуса эта плата - источних мощных помех, тест на электромагнитную совместимость она не пройдет.
6. Отсутствует опторазвязка логической части схемы, правда за всё время разработки необходимости в ней не возникало. Таже отсутствует защита от переполюсовки входного питания. Отсутствуют выходные фильтры на фазы двигателя, поэтому силовые провода от платы управления до двигателя должны быть как можно короче.
Вобщем эта разработка - попытка найти компромисс между ценой драйвера и его возможностями. Китайские блоки управления наверняка имеют все защиты и проходят тест на электромагнитную совместимость, но ситуация, когда для управления двигателем ценой в 2000р. нужен блок ценой в 5000р. мне кажется неправильной. Цель - получить блок управления стоимостью 2500р. (добавится ещё корпус) и плату индикации стоимостью 1000р.
А теперь немного теории.
1. Что такое бесколлекторный двигатель и зачем он нужен.
Если кто-нибудь нашел эту запись, то он уже в общих чертах представляет, что это такое. Поэтому я лучше начну с фотографий внутренностей обычных китайских двигателей и расскажу, в каких случаях стоит его использовать.
На фотографии 2 китайских двигателя FL42BLS01 и FL57BLS04. Характеристики их легко найти в яндексе или гугле. Именно FL42BLS01 я изначально выбрал для привода мешалки, а FL57BLS04 приобрел потом как более мощный для проверки платы. Есть ещё более мощная серия FL86, но пока я не вижу, где её можно применить.
А вот и разобранный FL42BLS01. Как видно, качество исполнения довольно неплохое для китайского двигателя. Крышки аллюминиевые с посадочными местами под подшипники, в задней крышке располагается плата с 3 датчиками холла. Датчики никак не выравниваются, просто торчат из платы, что не очень хорошо. Небольшое пояснение - для переключения обмоток статора нужно знать угол поворота ротора - датчики холла нахотятся вблизи ротора и срабатывают(или выключаются) при изменении направления магнитного поля. Это самые распостраненные датчики. Статор набран из стальных пластин, вообще в его конструкции нет ничего необычного. Ротор точеный, с наклеенным на него магнитным кольцом, которое выкрашено черной краской.
А это уже фото FL57BLS04, здесь датчики холла находятся в пластиковой обойме и на роторе для них сделано отдельное магнитное кольцо, что лучше ) Передний подшипник на роторе больше заднего, и это тоже правильно. Магнит ротора набран из 4 штук, унификация однако. Например в младшей модели FL57BLS01 на роторе будет только 1 такой магнит.
Теперь неплохо бы разместить фото коллекторного двигателя для сравнения, но оказалось довольно сложно найти небольшой качественный коллекторный двигатель с подшипниками. Дорогую экзотику от Maxon motor я не рассматривал. Правда есть советские двигатели типа ДПР и ДПМ, но они давно не выпускаются и закладывать их в новые конструкции нежелательно. Хотя потом наверное размещу фотографию его устройства.
Главные достоинства бесколлекторного двигателя. которые и определяют применение - долговечность, высокие динамические характеристики, высокая мощность и крутящий момент при небольших габаритах.
Недостаток один и самый главный - цена связки двигатель+блок управления+блок питания.
В тех случаях, когда не нужна долговечность - лучше использовать коллекторные двигатели, что и делают производители электроинструмента, и совершенно правы. В стационарном оборудовании, где не важны габариты и динамические характеристики лучше использовать асинхронные двигатели. Но в диапазоне малых мощностей асинхронные двигатели существенно крупнее бесколлекторных, вот почему для привода мешалки я остановился на бесколлекторнике.
Наиболее известная область, где бесколлекторные двигатели вне конкуренции - авиамоделизм.
Какими бывают бесколлекторные двигатели :
- бездатчиковые, с датчиками холла, с энкодером.
На самом деле для работы двигателя всё равно нужно как-либо определять положение ротора и бездатчиковые двигатели не совсем бездатчиковые - положение ротора определяется по напряжениям в обмотках(противоЭДС), возникающих при вращении ротора и зависящих от его скорости и положения. Главная проблема - раскрутить ротор, стабильно определять положение таким методом можно только на высокой скорости. Про высокие динамические характеристики при таком управление можно забыть. Плюс такого решения - уменьшение цены. Именно такие двигатели используются в авиамоделизме, в шпинделе жестких дисков, в вентиляторах.
Датчики Холла устанавливаются на двигатели, от которых требуется уверенный старт, возможность работать на небольших оборотах и высокий момент с начала движения, но к точности положения ротора требования невысоки. Такие двигатели можно найти в капстанах видеомагнитофонов, в сидиромах, в транспортных средствах.
И наконец по энкодеру положение ротора определяют, когда важна точность разгона, позиционирования и торможения. Это сервоприводы станков. Энкодер в простейшем виде можно увидеть в старой мышке с шариком. Диск с множеством прорезей и оптопара дают несколько десятков срабатываний за один оборот. Промышленные энкодеры выполняются с высокой точностью, поэтому стоят дорого. Точность нужна для расчета ускорений привода, к электронике также высокие требования.
-Инраннеры и аутраннеры. Термины пришли из моделизма. Инраннер - цилиндрический ротор находится внтри двигателя(как на фотографях выше). Аутраннер - ротор в виде чашки вращается снаружи, а внутри расположен статор с обмотками. Аутраннеры имеют больше момент, но несколько меньшую мощность. Практически все промышленные двигатели - инраннеры, я знаю только линейку аутраннеров от Japan Servo. Но в моделизме аутраннеры распространены.
Кстати шаговые двигатели - это разновидность бесколлекторных двигателей, но с очень большим числом полюсов. Поэтому они имеют больше момент, но меньшую мощность. Бесколлекторый двигатель также можно использовать как шаговый, но шаг будет значительно больше, а момент удержания значительно меньше. Если же шаговый двигатель оснастить энкодером - можно значительно улучшить его динамические характеристики, получится дешевая альтернатива серводвигателям.
О контроллерах бесколлекторных двигателей и их схемотехнике я написал в следующей записи.
 На одной стороне видно 6 транзисторов в корпусах SOIC. (3 N-канальных, 3 P-канальных), на другой стороне микроконтроллер ATMEGA8 и линейный стабилизатор для получения 5В питания. Ещё есть электролитический конденсатор и всякая мелочь - резисторы с конденсаторами. И всё. Дешево и сердито. Цена в рознице около 1000р. Микроконтроллер напрямую управляет затворами транзисторов. Греется такой контроллер довольно сильно, но так как он устанавливается на авиамодели, то хорошо обдувается. Разумеется есть более продвинутые модели, это просто пример упрощения и миниатюризации.
На одной стороне видно 6 транзисторов в корпусах SOIC. (3 N-канальных, 3 P-канальных), на другой стороне микроконтроллер ATMEGA8 и линейный стабилизатор для получения 5В питания. Ещё есть электролитический конденсатор и всякая мелочь - резисторы с конденсаторами. И всё. Дешево и сердито. Цена в рознице около 1000р. Микроконтроллер напрямую управляет затворами транзисторов. Греется такой контроллер довольно сильно, но так как он устанавливается на авиамодели, то хорошо обдувается. Разумеется есть более продвинутые модели, это просто пример упрощения и миниатюризации.